یک ترموکوپل از تفاوت دمای بین اتصال گرم و اتصال سرد در دو سمت مخالف، یک ولتاژ تولید میکند (یک نیروی حرارتی محرکه الکتریکی). به این دلیل، یک ترموکوپل یک دمای نسبی خروجی میکند، نه یک دمای مطلق. برای اینکه کنترلر دما بتواند دمای مطلق را از دمای نسبی که ترموکوپل خروجی کرده است، محاسبه کند، تاثیر دمای اتصال سرد، جبران شده یا خنثی میشود، که این کار با تشخیص دمای اتصال سرد و افزودن نیروی حرارتی محرکه الکتریکی انجام میشود که متناسب با دمای نیروی حرارتی محرکه الکتریکیِ ترموکوپل است. به روش محاسبهی دمای مطلق اتصال سرد با افزودن ولتاژ، جبران اتصال سرد گفته میشود.
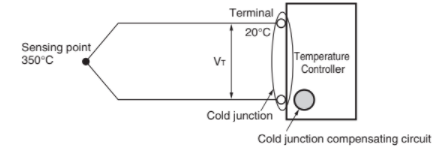
در شکل بالا، نیروی حرارتی محرکه الکتریکی (1) VT که در ترمینال ورودی کنترلر دما اندازهگیری میشود، برابر با V (350, 20) است.
اینجا V (A, B) نیروی حرارتی محرکه الکتریکی را میدهد، وقتی که اتصال سرد A °C و اتصال سرد B °C است. بر اساس قانون دمای میانی، یک رفتار اساسی ترموکوپلها، (2) V (A, B) = V (A, C) – V(B, C).
وقتی که دمای محیط (بخش ترمینال) 20°C است، سنسور دما داخل کنترلر دما 20°C را تشخیص میدهد. اگر ولتاژ V(20, 0) را اضافه کنیم که متناسب با این 20°C در جدول استاندارد نیروی محرکه الکتریکی در سمت راست است، به این نتیجه میرسیم:
V (350, 20): نیروی حرارتی محرکه الکتریکی از ترموکوپل
+
V (20, 0): نیروی محرکه الکتریکی ایجاد شده توسط مدار جبران اتصال سرد
اگر بخش اول فرمول (2) را با A=350, B=20, C=0 بسط دهیم، به این میرسیم:
= V{(350, 0) – V(20, 0)} + V(20, 0) = V(350, 0)
V(350, 0) نیروی حرارتی محرکه الکتریکی برای دمای اتصال سرد 0°C است. این مقداری است که به عنوان نیروی استاندارد حرارتی محرکه الکتریکی توسط JIS تعریف شده است، پس اگر ولتاژ را چک کنیم، میتوانیم دمای اتصال گرم (اینجا 350°C) را پیدا کنیم.